What are gear defects and what causes them?
Gear faults typically occur in the teeth of a gear mechanism due to fatigue, spalling, or pitting. These can be manifested as cracks in the gear root or removal of metal from the tooth surface. They can be caused by wear, excessive loads, poor lubrication, backlash, and occasionally improper installation or manufacturing defects.
Why are gear faults a concern?
Gears are the main elements of power transmission in many industrial applications and are subjected to significant stresses and loading. Their health is critical to the proper operation of the entire mechanical system. A well-known example of this in the renewables field is the fact that the greatest contributor to wind turbine downtime (and consequent revenue erosion) is the failure of the multistage gearbox in the main powertrain. Similar considerations apply in industrial applications.
How are gear faults detected and diagnosed?
Gear faults are tricky to detect due to the difficulty in installation of vibration sensors close to the fault and the presence of significant background noise due to multiple mechanical excitations within the system. This is especially true in more complex gearbox systems, in which there can be multiple rotational frequencies, gear ratios, and meshing frequencies. Consequently, multiple and complementary approaches can be taken in the detection of gear faults, including acoustic emissions analysis, current signature analysis, and oil debris analysis.
In terms of vibration analysis, the gearbox casing is the typical mounting location for an accelerometer, with the dominant vibration mode being in the axial direction. Healthy gears produce a vibration signature at a frequency known as the gear mesh frequency. This is equal to the product of the shaft frequency and the number of gear teeth. There typically also exist some modulation sidebands related to manufacturing and assembly tolerances. This is illustrated for a healthy gear in Figure 1. When a localized fault such as a tooth crack occurs, the vibration signal in each revolution will include the mechanical response of the system to a short duration impact at a relatively low energy level. This is typically a low amplitude, broadband signal that is generally considered to be non-periodic and non-stationary.
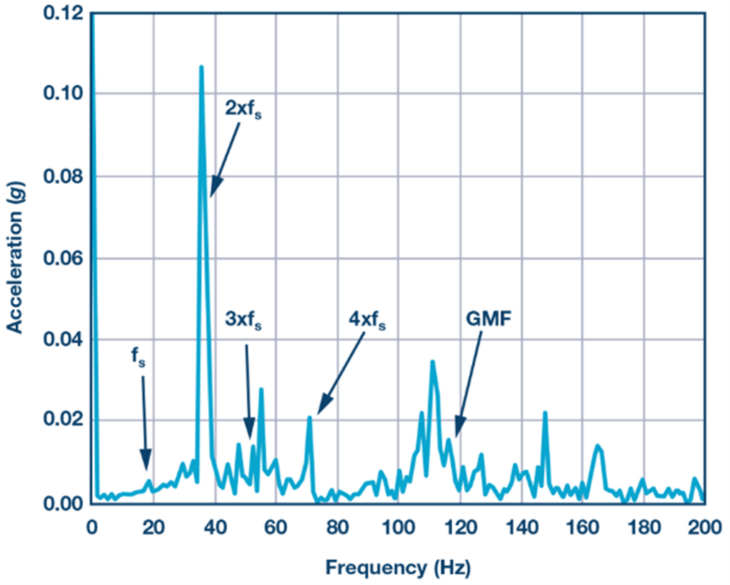
Figure 1. Frequency spectrum of a healthy gear with crank shaft speed at ~1000 rpm, gear speed at ~290 rpm, and gear teeth = 24.
As a result of these particular characteristics, standard frequency domain techniques on their own are not regarded as suitable for accurate identification of gear faults. Spectral analysis may be unable to detect early stage gear failures as the impact energy is contained in sideband modulation, which can also contain energy from other gear pairs and mechanical components. Time domain techniques such as time-synchronous averaging or mixed-domain approaches such as wavelet analysis and envelope demodulation are generally more appropriate.
What system specifications must be considered when diagnosing a gear fault?
Wide bandwidth is generally very critical in gear fault detection, since the number of gear teeth acts as a multiplier in the frequency domain. Even for relatively low speed systems, the required detection frequency range is quickly pushed up in to the multiple kHz region. Moreover, localized faults further extend the bandwidth requirement.
Resolution and low noise are extremely critical for several reasons. The difficulty of mounting vibration sensors in close proximity to specific fault zones means that there is potentially higher attenuation of the vibration signal by the mechanical system, making it vital to be able to detect low energy signals. Furthermore, since the signals are not static periodic signals, standard FFT techniques to extract low amplitude signals from a high noise floor cannot be depended on—the noise floor of the sensor itself must be low. This is particularly true in a gearbox environment in which there is a mixing of multiple vibration signatures from different elements of the gearbox. Added to these considerations is the importance of early detection not just for asset protection reasons, but for signal conditioning reasons. It has been shown that vibration severity can be higher in the case of a one-tooth breakage fault, as opposed to a fault with two-or-more-tooth breakage, implying that detection may be relatively easier at the early stages.
This tip adapted from the technology article found here.