Electrical testing of Direct Current (DC) electric motors is a challenge within industry, manufacturing and repair centers alike. The key issue has to do with the ability to compare one coil to the next, should exact information not be provided. In this article, the issue of simple tests to increase the confidence of testing and analysis conclusions using Motor Circuit Analysis (MCA) shall be discussed. The term MCA is derived from a test method that provides information on the basic components of an AC or DC electric motor. These basic components include resistance, measured in Ohms; impedance, measured in Ohms; inductance, measured in Henries; the induction winding phase angle, measured in degrees; and, insulation resistance, measured in Meg-Ohms. The instrument that will be referred to in this article provides these readings by generating a low voltage, true sine-wave, alternating current (impedance, inductance, phase angle), signal at frequencies from 100 to 800 hertz, a low voltage DC signal for resistance, and 500 or 1,000 volts DC for the insulation resistance test. In addition, a special test called I/F is performed in which the applied frequency is doubled and a ratio results from the change in the winding impedance. This test is introduced to identify early winding shorts that may exist in the winding. Using the applied data, the condition of a DC motor winding can be evaluated through coil comparisons, comparisons to known readings, or by trending changes to the windings over a period of time. The DC electric motors that will be included in this article are series, shunt, and compound DC motors. Some of the basic tests described can be performed on permanent magnet, DC servo, DC machine tools, and others (although brushless DC motors are evaluated in a similar fashion to AC motors). The types of DC electric motors can be described by their windings and connections.
DC Motor Theory
Direct Current electric motors operate under a basic principle of electricity: interaction between two magnetic fields positioned at an angle from each other will attract/repel resulting in movement. In the case of a DC electric motor, power is provided to a stator field and an armature creating magnetic fields that are, electrically, about 90 degrees from each other. The resulting attraction/repulsion of the armature from the field generates a torque and the armature turns.
The basic components of a DC electric motor include:
Frame Makes up the outer structure of the machine. It is used to mount most of the other components of the motor
Fields Are coils mounted on field pole pieces that generate a stationary magnetic field.
Interpoles Are coils that are placed between the field coils that generate a field that is used to prevent excessive sparking of the brushes.
Endshields Also called bearing housings, are used to house the brushes, brush rigging, and to house the shaft bearings, holding the armature centered in the frame.
Brush rigging Holds and positions the brushes above the armature commutator. Usually, the tension device is used to maintain a constant pressure on the brushes.
Brushes Are used to provide DC to the armature. The brushes ride on the commutator.
Commutator Consists of many copper bars that are separated by mica. Each bar is connected to coils in the armature.
Armature Is the rotating portion of the motor that contains coils.
Unlike most AC motors, DC motors require separate power to be provided to both the fields and the armature. The DC provided to the stator fields generate a constant North and South set of fields. DC provided to the armature generates North and South fields that are 90 electrical degrees from the stationary field. As the armature generates a torque and moves towards the appropriate North or South pole, the brushes change position on the commutator, energizing another set of coils 90 electrical degrees from the stationary field. This actually makes the armature an Alternating Current component as the current will travel in one direction, based upon brush position, then in another direction as the motor operates. The brushes are set in such a position that they are electrically neutral (no induced current from the stator fields) in order to reduce sparking. In most DC motor connections, by varying the armature voltage, the operating speed may be changed. One general danger that is inherent in DC motors is that if field current is lost while the armature current is maintained, the motor may take off and the speed increase until the armature self-destructs.
The three basic winding types that can be used to identify the type of DC motor include:
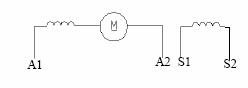
Normally found in applications that need a high starting torque. They consist of a set of field windings of large wire and relatively few turns, marked S1 and S2, that are connected in series to the interpoles and armature, marked A1 and A2 (See Figure 1). Series connected motors are normally used as traction motors and have a very low basic resistance.
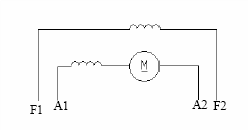
Normally found in applications that require constant speed. They consist of a set of field windings of smaller wire with many turns, marked F1 and F2 for single voltage and F1, F2, F3 and F4 for dual voltage, and A1 and A2 for the interpoles and armature (See Figures 2). Shunt connected motors are normally used as crane and machine tool motors and have a relatively high basic resistance.
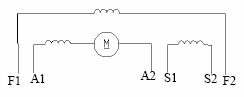
Combine the benefits of both the series and shunt wound motors. They provide a relatively high torque with a basic resistance to a change in operating speed. The connections combine both the series and shunt connections (See Figure 3). Compound motors are the most common and are commonly found in industrial manufacturing.
Figure 3: Compound Wound Motor
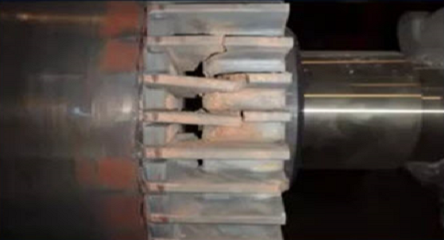
As it can be seen, there are few coils to compare to each other in an assembled DC machine. However, procedures can be developed for winding testing that provides a high level of test result confidence. Common DC Motor Electrical Faults There are a number of common DC motor electrical faults of which the most common will be described here. These result from issues specific to DC motor design as a result of temperature, friction and internal contaminants such as carbon or graphite. One of the most common causes of winding faults in a DC motor is from winding contamination from carbon or graphite (carbon) dust from the brushes. The fine powder permeates all of the stationary and rotating windings and will create a path between conductors or between conductors to ground.
Carbon is often trapped and problems aggravated further through cleaning and maintenance practices when the carbon is blown with compressed air or the armature is cleaned and baked. In either case, the carbon may become tightly packed in corners, usually just behind the commutator. This will end as a ground fault or shorted turns right at the commutator connection. Another common fault, that is often not considered, is cooling of the DC machine. This may occur because cooling passages are blocked, the armature is turned too slow with no additional cooling, or from dirty filters (the most common cooling-related fault). Temperature is the greatest enemy of electrical equipment, particularly the insulation system, of which the life will be reduced by half for every 10 degrees centigrade increase in temperature (accepted rule of thumb). As the insulation weakens, its reliability decreases until winding faults between turns occur.
In addition to the insulation system degrading, brushes also degrade faster, causing increased wear on the commutator and additional carbon contamination of the windings. Another fault that is related to heat is generated from practices that have the fields energized with the armature at rest (de-energized). This is a common mode of operation that requires a separate blower to provide cooling to the motor that normally has filters that must be kept clean. This type of fault normally results in shorted shunt coils, reducing the motor s ability to produce torque and may end with the dangerous condition of armature overspeed if not maintained properly. The commutator also provides opportunities for faults, as well as an indicator of motor operation and condition. A properly operating DC motor will have a fine glaze of carbon on the commutator with the bars looking uniform. Burned commutator bars, streaked glazing, heavy carbon, or overheated commutator conditions indicate potential problems that should be addressed.
DC armatures are the most time consuming but easiest component to test. There are three basic methods that will be introduced: trending; assembled; and, disassembled. In the case of trending, all measurements are used, however, in the case of assembled and disassembled testing a bar to bar impedance measurement will be used. Impedance is viewed because the armature is an AC component and simple resistance measurements may miss some faults including shorts and grounds. Trending will be reviewed in an overall trending procedure for DC motors later in this article.
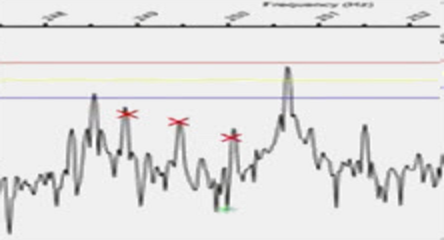
When testing an assembled DC motor armature, the best method is to perform whats commonly known as a bar-to-bar test using the motor brushes. In the case of a DC motor that has two brushes, none of the brushes needs to be raised, in the case of a DC motor that has four or more sets of brushes, all but two sets 90 degrees from each other need to be raised, which takes them out of the testing circuit. Make sure that good contact is maintained on the commutator by ensuring that 90%+ of the brush is in contact with the commutator bars and that the commutator bars are clean. If they are not clean, polish the armature gently, using an approved method, before testing. If the commutator is badly worn, it will need to be disassembled and the commutator turned and undercut, in which case a disassembled bar to bar test would be appropriate. Once set, mark the position of one bar on the commutator, then bring the bar to a position where it is just under the leading edge of one of the brushes. In the assembled test, you will probably be covering at least one and a half bars with the brush. Perform an impedance test, mark down the reading, and move the armature so that the leading edge of the brush is over the next commutator bar. Take the next impedance reading and continue until each bar has been tested. A good result will show a consistent pattern, while an inconsistent pattern will identify a poor armature.
Disassembled bar-to-bar testing is similar to assembled testing, other than the armature is out of the frame and the tester has full access to the commutator. In this case, the tester will use an armature fixture or test leads to connect from bar to bar. The spacing between each impedance reading should be constant and about 90 to 180 degrees from each other. The first bar should be marked and testing continues until one leg of the testing fixture or test lead has made it 360 degrees around the commutator. Mark the impedance for each bar-to-bar test then look to ensure that there was a consistent pattern.
Series electric motors are very challenging to troubleshoot as they do not provide sets of fields to compare to. Readings may be taken from S1 to S2 and A1 to A2 then trended over time or compared to other similar machines.
When trending the readings over time, simple resistance readings must be corrected for temperature, usually relative to 25oC. Impedance and Inductance normally have limited change due to temperature while the phase angle and I/F readings will remain constant, regardless of temperature. Variations in the I/F and phase angle will indicate shorted turns, while changes in Impedance and Inductance will normally indicate dirty windings.
Comparing like motors will require additional information. The operator will have to ensure that the motor is of the same manufacturer and design, as well as speed, power, etc. The model motor must be new or rebuilt to original manufacturer s specifications. When performing comparative readings, the testing temperature should be similar from motor to motor, however, the I/F and phase angle readings can be directly compared. These readings should not change more than +/- 2 points for I/F and +/-1 degree for phase angle. A common error when series field windings are rebuilt, although less common that shunt coils are an incorrect replacement of wire size, which will impact the ability of the motor to generate torque.
Dual voltage shunt motors provide the ability to compare two sets of windings while single voltage motors will have the same test procedure as testing series motor windings, using F1 to F2 as opposed to S1 to S2. With dual voltage, the shunt windings are labeled F1 to F2 and F3 to F4 allowing the analyst to test and compare these two sets of windings.
When testing and troubleshooting the readings over time, simple resistance readings must be corrected for temperature, usually relative to 25oC. Impedance and Inductance will change more than a series wound motor because of the higher simple resistance of the circuit. The phase angle and I/F will remain constant, within 1 to 2 points, regardless of temperature. Variations in the I/F and phase angle will indicate shorted turns, while changes in Impedance and Inductance will normally indicate dirty windings. Comparisons between F1 to F2 and F3 to F4 should be less than 3% in resistance, inductance and impedance and no more than 1 point different in I/F or phase angle.
Like motors can be tested and compared the same as series wound motors. When possible, the motors should be tested, when trending readings, at the same temperature as the previous tests. For instance, within minutes of shutting down operating equipment or before starting equipment, this allows for the tests to be performed at like temperatures.
In place testing, trending and troubleshooting are much simpler with a compound motor. Single voltage compound motors are normally labeled A1 to A2, S1 to S2 and F1 to F2, dual voltage compound motors are normally labeled A1 to A2, S1 to S2, F1 to F2 and F3 to F4. A key additional point to a compound wound motor is that the series winding is normally wound on top of the shunt winding, allowing for possible faults between these two windings.
Trending a compound motor, the tests are normally taken from the DC drive terminals. Standard MCA tests using the ALL-TEST involve low voltage, higher frequency signals that will not harm the output electronics of the equipment, reducing the need to disconnect the leads from the drive while testing. However, if the analyst wishes to check insulation resistance between the series and shunt windings, the leads must be disconnected from the drive. When trending from the DC drive, test A1 to S2 and the two field leads then perform a 500 Volt insulation resistance test between the S2 and F1 leads and compare to previous tests or similar motors, in either case, insulation resistance readings should remain above 100 Meg-Ohms. The ALL-TEST unit allows the analyzer to immediately compare the past to present readings as a quick check allowing the analyzer to make a quick decision to test the windings further. As mentioned in series and shunt motor testing techniques, the I/F and phase angle readings should not change more than 1 point between tests, over time, the series and field windings will vary dramatically from each other, however.
Troubleshooting compound motors should be performed at the motor, itself. Disconnect all motor leads and separate them. Test the series and field windings as outlined in the series and shunt winding instructions, then perform an insulation resistance test between the series and shunt windings, the insulation resistance should be greater than 100 Meg-Ohms.
General DC MCA Testing Notes
Several key points can be made using MCA testing on any type of DC motor:
1. Any I/F reading outside the range of 15 to 50, for instance, -56, indicates a winding fault.
2. If the test shows an infinite resistance between leads of the same circuit indicates an open winding.
3. An increase in simple resistance between tests, when corrected for temperature, indicates a loose connection, in particular when impedance and inductance readings change. A reduced simple resistance, when corrected for temperature, may indicate a short, usually accompanied by changes in impedance, inductance, phase angle and I/F.
4. When testing like motors, the I/F and phase angle should not change more than 2 points, any difference greater than this should prompt a full analysis.
5. Changes when testing through the armature circuit should prompt a bar to bar test.
By following these simple instructions, using an MCA device will allow you to capture early faults long before the equipment fails during operation. If performing tests as part of a predictive maintenance program, the interval should be at least those shown in Table 1.
Table 1: DC Motor Testing Frequency
General maintenance tests are those that are not trended over time. Usually accompanied with vibration, bearing greasing, commutator inspection, and brush inspection. Predictive maintenance testing normally involves trending readings over time looking to detect potential faults than to determine the best time to remove the motor for corrective maintenance. Once a potential fault is detected, the testing frequency should increase until it is determined that the motor needs to be removed. A complete armature test should be performed either in conjunction with a general or predictive maintenance test due to the high stresses at the commutator and carbon contamination.
General electrical testing of direct current electric motors is made much easier with new techniques available with static motor circuit analysis. For the first time, early turn faults can be detected in series, shunt and armature windings before they take equipment out of operation. Predictive maintenance tests can be performed from the drive with troubleshooting tests being performed at the motor. In general, the tests are relatively quick, requiring less than five minutes per motor for predictive maintenance testing, with additional time required for troubleshooting. Overall, MCA testing dramatically improves DC motor testing
over the traditional methods of continuity tests.
Howard is the President of MotorDoc® LLC and the 2018 Chair of SMRP. He has over 35 years of electric motor testing, repair and design experience, starting with a US Navy motor repair job to advanced electric machinery design. Howard is also involved in legislation with the US Government regarding Cyber Security, Infrastructure, Energy, SmartGrid Education and Safety.
By using this site you agree to our use of cookies. You are free to manage this via your browser setting at any time. To learn more about how we use the cookies please see our cookies policy.